

A mathematical model identifies a single software setting that determines whether adaptive cruise control calms phantom traffic jams or amplifies them.
Researchers have found that adaptive cruise control, the technology that automatically maintains a safe following distance in millions of new cars, can either reduce or worsen phantom traffic jams depending on how a single software parameter is set by the manufacturer.
The finding, published in a paper posted to arXiv on February 1, 2026, gives automakers and regulators a mathematical tool to assess whether a given cruise control configuration will help or hurt highway traffic flow before vehicles reach the road.
Phantom traffic jams are the stop-and-go waves that appear on highways with no visible cause. A driver taps the brakes. The driver behind reacts and brakes slightly harder.
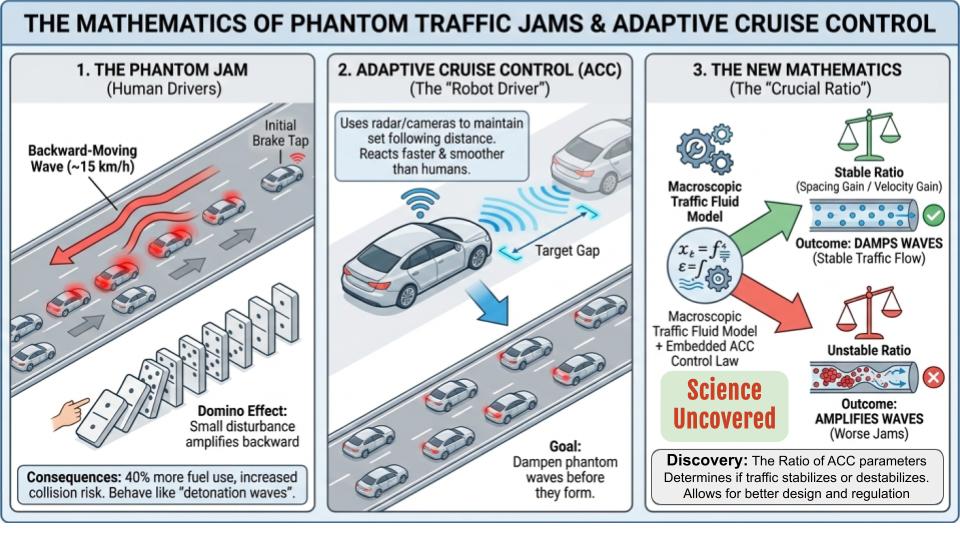
That reaction travels backward through traffic, amplifying with each car, until vehicles dozens of positions back are stopping completely. The wave becomes self-sustaining and can persist for hours. Stop-and-go driving caused by phantom jams burns approximately 40 percent more fuel than smooth highway travel and significantly increases rear-end collision risk.
What the research found
Adaptive cruise control uses radar and cameras to track the vehicle ahead and adjust speed automatically. By 2026, it ships as standard or optional equipment in most new cars sold worldwide. The technology was expected to reduce phantom jams because computers react faster and more smoothly than human drivers.
The reality is more complicated. The new model shows that ACC systems have two key software settings: one that controls how the car responds to changes in the gap ahead, and one that controls how it responds to speed differences with the car in front. The ratio between those two settings determines everything.
Get the ratio right and ACC-equipped cars absorb small disturbances before they can grow into jams. Get it wrong and the same technology amplifies those disturbances, producing worse congestion than human drivers would have caused on their own.
“The same ACC system can behave very differently depending on traffic conditions,” the researchers noted, finding that a configuration that works well in moderate congestion may perform poorly in near-standstill gridlock.
The researchers validated their model against real-world driving data and found it accurately reproduced observed traffic wave behavior.
Why it matters for drivers and regulators
Until now, automakers tested cruise control behavior using large computer simulations that model individual vehicles one by one, a slow process that does not easily reveal why a system performs the way it does.
The new model is built on fluid dynamics mathematics, the same type used to describe how water flows. By embedding the cruise control software equations directly into that framework, the researchers produced a tool that can show at a glance whether a given ACC design will stabilize traffic or make it worse.
As more vehicles with adaptive cruise control reach the road, their collective behavior increasingly shapes traffic patterns for everyone, including drivers without the technology. A configuration that destabilizes traffic in one car affects the vehicles behind it regardless of what those drivers are doing.
The researchers suggest the findings could support the development of technical standards for ACC software settings, similar to existing requirements for braking performance. No such standards currently exist.
Sources
[1] Helbing, D. (2001). Traffic and related self-driven many-particle systems. Reviews of Modern Physics, 73(4), 1067–1141.
[2] Horn, B. K. P., & Wang, L. (2018). Wave equation of suppressed traffic flow instabilities. IEEE Transactions on Intelligent Transportation Systems, 19(9), 2955–2964.
[3] Seibold, B. (2019, June). Why traffic jams are never your fault. The Saturday Evening Post.
[4] Flynn, M. R., Kasimov, A. R., Nave, J.-C., Rosales, R. R., & Seibold, B. (2009). Self-sustained nonlinear waves in traffic flow. *Physical Review E*, 79(5), 056113. https://doi.org/10.1103/PhysRevE.79.056113
[5] Stern, R. E., Chen, Y., Churchill, M., Wu, F., Monache, M. L. D., Piccoli, B., Seibold, B., Sprinkle, J., & Work, D. B. (2019). Quantifying air quality benefits resulting from few autonomous vehicles stabilizing traffic. *Transportation Research Part D: Transport and Environment*, 67, 351–365.
[6] Vanderbilt University / I-24 MOTION Research Project. (2025). Phantom jams and crash risk on Interstate 24.
[7] Stern, R. E., et al. (2018). Dissipation of stop-and-go waves via control of autonomous vehicles: Field experiments. *Transportation Research Part C: Emerging Technologies*, 89, 205–221.
[8] Li, Z., Lin, Q., Pu, F., Ahn, S., Zhang, Y., Jiang, J., & Zhou, Y. (2026). Unveiling traffic wave of linear adaptive cruise control: A second-order macroscopic traffic flow model. arXiv preprint arXiv:2602.01506.
[9] Lighthill, M. J., & Whitham, G. B. (1955). On kinematic waves II: A theory of traffic flow on long crowded roads. *Proceedings of the Royal Society A*, 229(1178), 317–345.

Ray Jackson holds a BSc in Electrical Engineering from the University of Manitoba and a PhD in Physics from Carleton University. His reporting interests include Current and Future Technologies, Engineering and Artificial Intelligence.